引入
一般做三维重建我们是采用多视图的,单视图虽然也能做,但需要有场景的先验信息,比如点的对应关系,线、面几何等,所以在条件允许的情况下,基于多视图的三维重建适用范围是要优于单视图的,这里介绍两视图的情况,包括它们包含的几何关系。
三角测量(Triangulation)
我们想要解决的问题是:
现给定一个三维点在两个或多个图像(相机矩阵已知)中的投影,希望找到该点的坐标。
以两图像投影为例,如下图: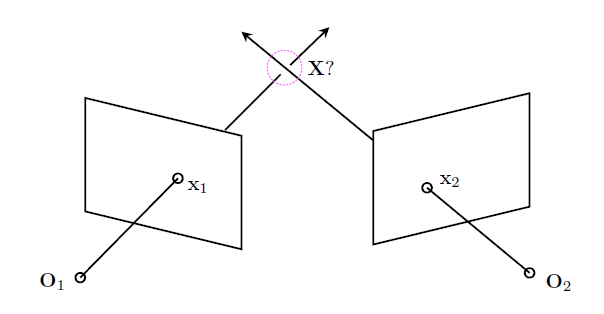
正常来说,由于相机矩阵是已知的,$O_1x_1$和$O_2x_2$我们都能表示出来,也就很容易求出这个空间三维点$X$了,然而这有个前提,就是那两条视线应该相交,但由于噪音和数值误差,这个条件一般都不能满足。\
也就是说一般情况下是这样子的: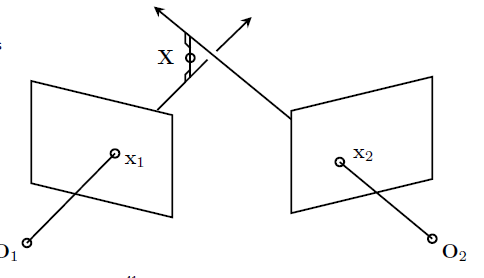
我们的想法是:找到连接两条视线的最短线段,并让 X 为该线段的中点。具体操作为:
- 寻找线段的方向(即垂直于两条射线);
- 构造两个平面,每个平面都包含该线段以及一条射线;
- 将该平面与其它射线相交以产生线段的端点;
- 找到中点。
找是找到了这个点,怎么求呢,我们现在已知的条件有:$x_1,x_2$,内参矩阵$K_1,K_2$,旋转平移$R,T$(也就是知道投影矩阵),这里主要有两种方法,线性法和非线性法。
线性法
线性法的话,精度不高但比较容易。\
由共线可知:
这明显就是个齐次线性方程组,用SVD分解很快就做出来了,这在之前相机那篇已经介绍过,这里就不赘述了,链接在这。 \
对于多于两个视图的情况,无非就是多列几个方程。
非线性法
这种方法简单说就是希望找到个$X$,使其最小化下面这个式子:
如图: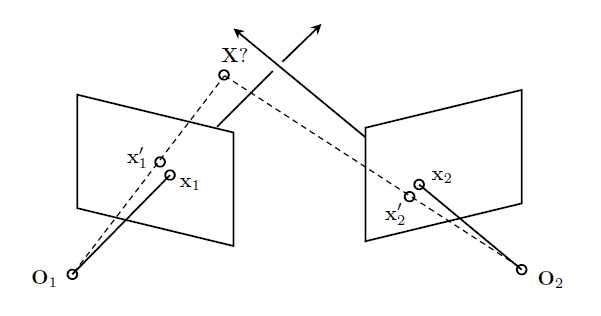
也即是说,我们要找的那个三维点,它投影到图像上的点,要跟我们观测点距离最小。也就是图中的最小。\
假设我们把世界坐标系设在$O_1$的位置,那么两个投影矩阵分别为:
至此条件都足够了,然后通过迭代求解就行,一般是用高斯牛顿法或者L-M法求解,这个在另一篇非线性优化里也已经介绍过了,链接在这。 \
极几何
接下来我们想知道的就是同一场景的两个不同视图之间的关系。\
这里先给几个后面需要用到的概念: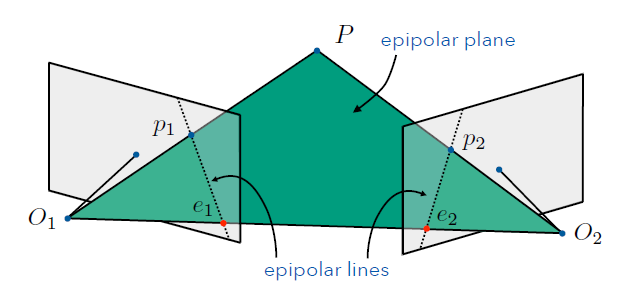
- 极平面(Epipolar plane): 过点$P$与两相机中心的平面;
- 基线(baseline): $O_1$与$O_2$的连线;
- 极线(epipolar lines): 极平面与成像平面的交线,也就是$p_1e_1$和$p_2e_2$;
- 极点(Epipole): 基线与成像平面的交点,也就是$e_1$和$e_2$。(可以在可见区域之外)
现在来看这个图: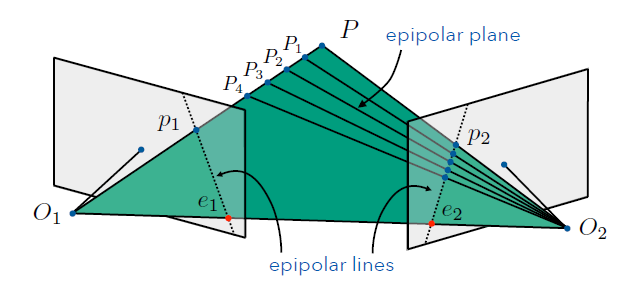
关于这个极几何有几个性质需要提一下(第3,4点比较重要):
- 极平面相交于基线;
- 极线相交于极点;
- $p_1$的对应点落在极线$p_2e_2$上;
- $p_2$的对应点落在极线$p_1e_1$上;
最后两个性质表明,我们要找一个像点在另一个平面的对应点时,不用整张图去找,只要找极线就行了。\
来看几个特例:\
(1). 平行视图: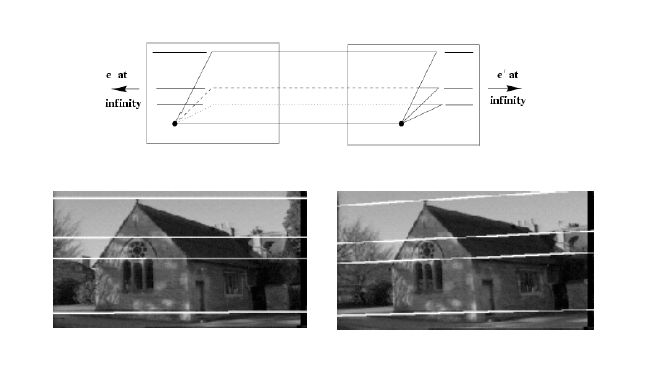
两个图像平行;\
基线平行于图像平面,两极点位于无穷远处;\
极线平行于图像坐标轴的其中一条轴。\
(2). 前后平移: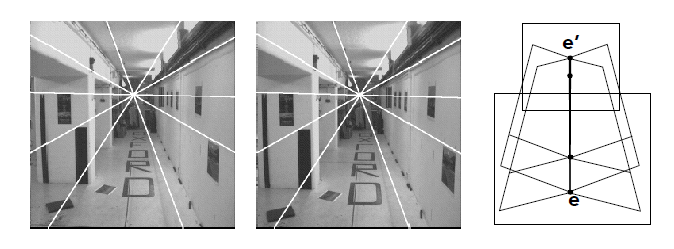
两幅图极点位置相同,极点称为展开焦点。
极几何约束
现在我们想要知道的是,一个图中的点和另一幅图中点的对应关系。\
如下图: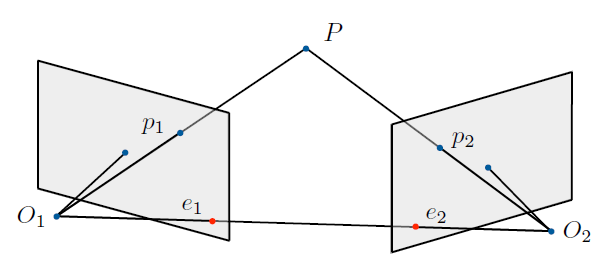
明显,我们有如下关系(这些关系都是等价的,一个意思):
- $\overrightarrow{O_1P},\overrightarrow{O_2P},\overrightarrow{O_1O_2}$ 共面;\
- $\overrightarrow{O_1p_1},\overrightarrow{O_2p_2},\overrightarrow{O_1O_2}$ 共面;\
- $\overrightarrow{O_1p_1}\cdot [\overrightarrow{O_1O_2}\times \overrightarrow{O_2p_2}]=0$。
本质矩阵情况下
这种情况我们考虑的是规范化相机,规范化相机是指相机内参数矩阵为单位矩阵的相机,即是:
假设$p_1=(u_1,v_1,1)^T$,$p_2=(u_2,v_2,1)^T$,上面最后一个关系(3)就等价于:
上面这个呢就是外极性约束了。\
叉乘的话可以表示成矩阵形式,比如说
所以本质矩阵:$E=[t]_{\times}R$\
将上面那个外极性约束用本质矩阵描述的话是:
也就是说空间一个三维点在双视图中必须满足 $p_1^TEp_2=0$。\
随着这个本质矩阵带来的,还有下面一系列的重要性质:
- 极线用本质矩阵可表示为:$l_1=Ep_2$, $l_2=E^Tp_1$;
- $e_1^TE=E^Te_1=0$与$Ee_2=0$;
- 本质矩阵是奇异的,秩为2; 剩下的两个特征值相等;
- 本质矩阵有5个自由度(三个旋转+三个平移,但$det(E)=0$去掉了一个,或者说由于比例是任意的,所以去掉了一个)。
(上面4个性质都容易证明,就不写了,但有一个性质需要记住:反对称矩阵的秩是偶数的)\
举个平行相机的例子,如图: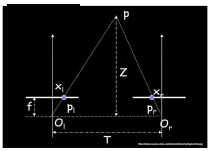
由于是平行的,$R=I$,平移量为$b$,则$t=[-b,0,0]$,所以本质矩阵为:
由约束条件 $p_{1}^TEp_2=0$ 得:
解得:$y_1=y_2$, $x_2$ 任意。
基础矩阵情况下
一般情况下我们的相机都不是规范化的相机,而是普通的一般化相机,不适用于上面的情况,这时候就引出了与本质矩阵相对的“基础矩阵”。\
依旧是这个图: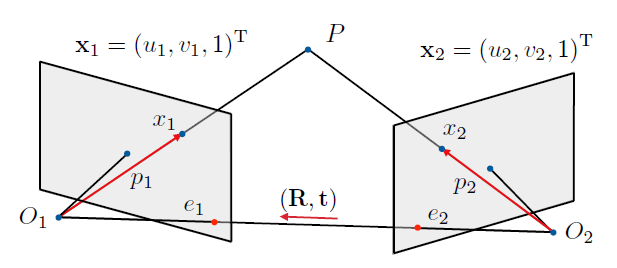
但这时候的$K$不再是单位矩阵了,怎么做?\
最直接的想法就是把它转化为规范化相机。\
我们假设两个内参矩阵分别是:$K_1,K_2$,这两个是已知的。然后有如下关系:
即是:
设:$K^{-1}x_1=x_{1c}$, 所以有:
同理,$K_2^{-1}x_2=x_{2c}$
如此得出来的$x_{1c},x_{2c}$就是规范化相机下$P$的对应点。\
文字描述的话就是:把成像平面上实际观测点乘以该相机内参数矩阵的逆矩阵,就可以得到对应的规范化相机下的点。\
由本质矩阵的性质有:
中间这串就是我们要引出的基础矩阵$F$:$F=K_2^{-T}[t]_{\times}RK_{1}^{-1}$,然后我们就可以有如下结论:
基础矩阵有与本质矩阵类似的性质,如下:
- 极线分别是:$l_1=Fx_1$和$l_2=F^Tx_2$;
- $Fe_1=0$与$F^Te_2=e_2^TF=0$;
- $F$是奇异的,秩为2;
- $F$有7个自由度(尺度任意,$det(F)=0$)。
估计基础矩阵:归一化八点算法
$F$有7个自由度,理论上7个点就可以求解了,但这样做的话解是非线性的,很麻烦,所以这里用8个点,俗称“八点算法”。\
现假设一个三维点在两成像平面上的观测点分别为:$[x’,y’,1]$和$[x,y,1]$,按照上面的结论我们有:
展开的话即是:
简写成:
由于$f$不能为0,所以添加一个约束:$||f||=1$,这,又是带约束的齐次方程,正经8个点的话直接算,但一般我们会用多于8个点去估计,以减少误差,这时候就可以用SVD分解,相关计算看相机那篇,在这。\
但是在计算之前我们不能忘了数值稳定性,也就是说方程组的系数应该在同一数量级,比如像素是$1E6$,也就是说要预处理,不然会由于数值差异很大导致最后结果精度很低。方法过程如下: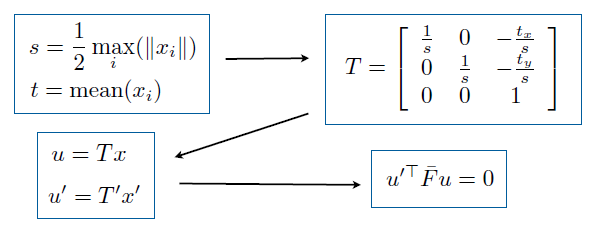
之后就可以求解了。
但用这种方法算出来的还不是我们要求的基础矩阵,因为基础矩阵的秩应该是2,而这种方法算出来的矩阵秩通常为3,即满秩。\
要解决这个问题也简单(且粗暴),加入在上面我们求出来的满秩“基础矩阵”为 $\widetilde{F}$,我们对其再做一次SVD分解:
令:
接着回构:
由于上面我们对坐标进行了处理,最后一步把$\overline{F}$返回去:
用这种奇异值置零的方法我们可以保证求出的$F$满足在约束 $det(F)=0$ 的情况下最小化 $||F-\widetilde{F}||_F$\
至此求解就结束了。\
上述过程可以用下面这张图总结: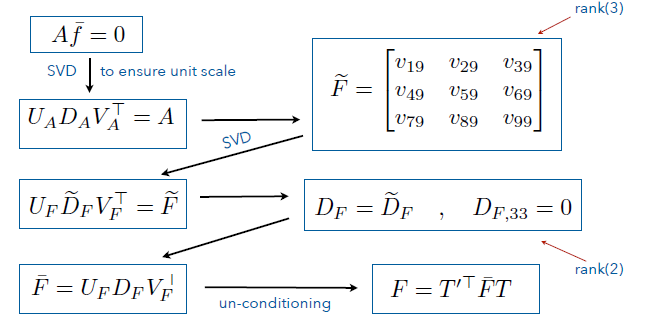
参考
【1】 https://www.youtube.com/watch?v=BKVEvj9F_H4&list=LL&index=42