引入
相机模型化的话,说白了就是一个函数,把一个三维场景转化为二维图像。这里主要是介绍基本相机模型,世界、相机、图像坐标系之间的转换以及相机的标定。
相机模型
这里用最简单也是最广泛的针孔相机模型,单目的,也就是下面这个: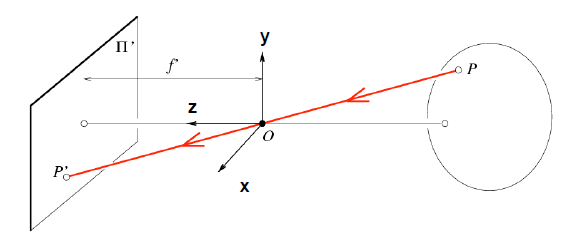
从3D到2D的转换中我们遗失了角度以及距离信息。\
假设点$P$的三维坐标是$[x,y,z]$,其对应图像坐标为$[x^,,y^,]$,有如下关系: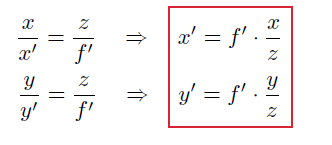
(就是简单的相似三角形)\
也就是说:
用齐次坐标表示的话为: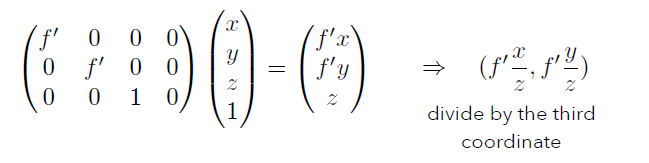
在很多地方左边的那个等式会写成这样子:
虽然看上去只是把系数提出来而已,但表达的意思却多了一个:对于同一个图像坐标,其三维坐标有无数种可能,只要在投影线上就行。这是引进齐次坐标的一个很大的特点。
坐标系转变
上面那种情况是最简单的,但一般来说,相机在世界坐标系中的位置是不定的,所以要在中间引入一个新的坐标系————相机坐标系,又叫归一化坐标系。\
所以这里要用到三个坐标系,分别为:世界坐标系,相机坐标系和图像坐标系,它们的转变过程如下: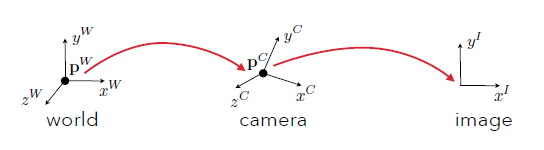
也就是:
首先将世界坐标转为相机坐标\
然后将相机坐标转为图像坐标
世界坐标到相机坐标
(这个过程也就是归一化的过程)\
相机坐标与世界坐标是旋转加平移的关系,即是如下:
其中:$\widetilde{c}$是相机中心在世界坐标系中的位置。\
写成齐次形式的话就是: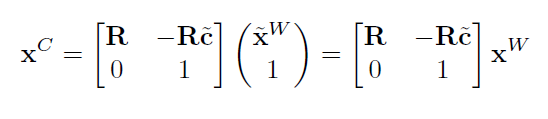
这是一种线性变换的形式,这时候维度还没有遗失\
这个转换矩阵写简洁一点即是:
其中$t=-R\widetilde{c}$
相机坐标到图像坐标
这里先给三个定义:
- 主轴(Principal axis):从相机中心垂直于图像平面的线;\
- 归一化(相机)坐标系(Normalized (camera) coordinate system):以相机中心为原点,z轴为主轴的坐标系\
- 主点(Principal point):主轴与图像平面相交的点(归一化坐标系的原点)
即是下图这样: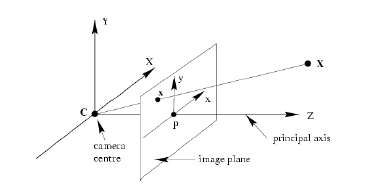
相机坐标系的原点在主点上,而图像坐标系的原点在角落(一般是左上角),也就是说,两个坐标系存在着偏移量,以图像坐标系为参考的话,该偏移量为$(p_x,p_y)$。\
将最上面那个投影转换写下来,对于三维坐标点$(X,Y,Z)$,其图像坐标为$(f\frac{X}{Z},f\frac{Y}{Z})$,即:
写成紧凑一些的形式为:
其中:
(注意,这里有个非齐次向齐次转换的计算)\
然后考虑这个中心偏移量,即对于三维坐标$(X,Y,Z)$,其图像坐标应为$f\frac{X}{Z}+p_x,f\frac{Y}{Z}+p_y$,写成矩阵计算形式如下:
这里对应的的$K$为标定矩阵(calibration matrix),即:
也就是输入一个归一化的世界坐标,通过矩阵$K$可以得到其对应的图像坐标。\
但是这里还有一个问题,就是说对于世界坐标系,我们用的单位一般会是“米”,“厘米”,“英寸”之类的,但在图像坐标系中我们统一使用“像素”为单位,所以这还需要一个转换过程:
假设在水平方向上以某一单位(m,mm,inch,…)为基准共有$m_x$个像素,在垂直方向上有$m_y$个像素。
就有如下关系:
以上这些就是相机的主要内参数,包括有:
- 主点坐标;\
- 焦距;\
- 像素放大系数;\
- 对于非矩形像素,还有偏斜系数(Skew),这里不讨论。\
常见的还有畸变参数,这个是为了补充内参数的,下面会讨论。\
这些参数是相机在出厂时就设定好的,一般不会轻易改变。
总结
用一张图简单总结下: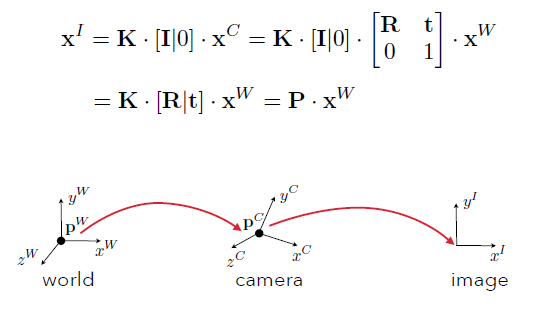
这里的矩阵$P$是投影矩阵,即是给一个齐次世界坐标,通过矩阵$P$,可以得到对应的齐次图像坐标,其中$K\in R^{3\times 3}$,$P\in R^{3\times 4}$。
正投影模型
关于这个简单说一下就好,正投影,也就是平行投影,形式如下: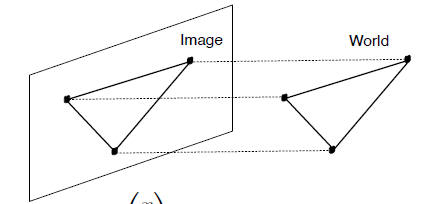
其投影矩阵为:
相机标定
相机标定就是根据某些方法确定出相机的内参数和畸变参数。
不考虑畸变
先假设我们有三维坐标点$X_i$,以及对应的图像坐标点$x_i$,都是齐次的,现在想要估计投影矩阵$P$。\
由于共线性,有如下关系:
即:
这里$p_j^T$表示矩阵$P$的第$j$行。\
用叉积:
即:
写成矩阵乘积形式为:
这个矩阵$P$虽然有12个参数,但由于尺度是随意的,所以实际只要考虑11个自由度就行,然后由于上面那个矩阵等式只提供了两个线性独立等式(因为秩为2),所以为了求解矩阵$P$,我们最少需要6个 3D/2D 对应点。如果我们有多于6个数据对的话,那就更好了,可以用最小二乘法估计。\
假设我们现在有很多个数据对,根据上面的方法写成如下形式: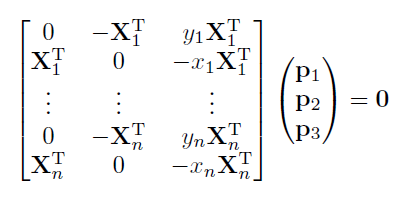
简单记为:
由于当$p=0$时虽然符合方程,但明显不是我们想要的,要排除,所以加个约束:$||p||=1$,也就是如下齐次最小二乘形式:
先说解法步骤:
- 进行SVD分解:$A=USV^T$
- 假设奇异值是排好序了的,即$S=diag(s_1,…,s_{12}),s_{i+1}\leq s_i$
- 取最后一个右奇异值向量,此时$p=v_{12}$
为什么是这样?下面简单说明。
齐次最小二乘:简介
现假设向量$p\in R^n$满足:
其中$A\in R^{m\times n}$且$0\in R^m$,进一步假设$m\geq n$且$rank(A)=n$。\
由于$A$是测量矩阵,就难免有噪音,所以我们会最小化下面这个:
为了避免$p=0$这个解,我们在这里加个约束$||p||=1$,也就是说现在我们的问题变为:\
在约束$||p||=1$的条件下,寻找$p$,使得$||Ap||^2$最小。
现在开始解这个问题。\
首先我们改写这个约束条件为:$1-p^Tp=0$,然后用拉格朗日乘子:
即:
这里$p$是$(A^TA)$的特征向量,$\lambda$是特征值。\
这就引出了特征值和特征向量了,但现在还有个问题,我们要选哪个特征值/向量?\
回到我们原来的问题,我们要最小化如下的量:
用约束$||p||=1$改写一下如下:
这就出来了,我们要选的$p$就是$A^TA$最小特征值对应的特征向量。
然后继续,毕竟上面我们的对象是$A^TA$,不是$A$,现在要引进SVD分解。
齐次最小二乘:SVD
SVD,即是奇异值分解,全称为singular value decomposition,表示成如下形式:
其中$U\in R^{m\times n}$,$V\in R^{n\times n}$是正交的(即是逆等于转置,行列式绝对值为1的矩阵),$S\in R^{n\times n}$是对角矩阵,且值沿对角线递减。\
现在我们有:
上面这个式子就是一个特征值分解(正交性),所以我们可以看到:
- $A^TA$的特征向量就是$A$的右奇异向量;
- $A^TA$的特征值是$A$奇异值的平方。
所以,要找$A^TA$的最小特征值,就是要计算$A$的最右边的奇异向量。\
至此就回答完上面的问题了。\
关于SVD分解,详细的可以参看这篇。
通过$P$求$K$
至此我们就求出了投影矩阵$P$,它包含了相机的外参和内参,但相机的标定只要求内参,所以我们要继续往下做。\
这里矩阵$P$是一个$3\times 4$的矩阵,我们把它按如下方式分解:
这里矩阵$M\in R^{3\times 3},m\in R^{3\times 1}$,然后将矩阵$M$进行QR分解成一个上三角矩阵$K$和一个正交的矩阵$R$,这里的$K$就是我们要的标定矩阵,$R$是旋转矩阵。最后,通过SVD找到c作为P的零空间。\
至此,这种不考虑畸变的标定就结束了。
考虑畸变参数
上面是特殊情况,一般在现实中我们是不能忽略畸变参数的,在进行标定前,先对畸变参数作简要说明。\
畸变参数
根据畸变的方式不同畸变参数可分为两部分,径向畸变和切向畸变(还有其他的比如薄透镜畸变,这里不考虑)。
径向畸变
径向畸变是由于透镜形状的制造工艺导致。且越向透镜边缘移动径向畸变越严重。\
比如说这是我们正常的图像: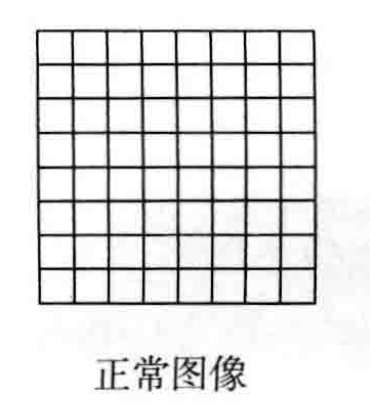
其中的像素点坐标我们用极坐标来表示,为$(r,\theta)$,径向畸变的话,就是$r$的缩放,其又分为两种,分别为桶形畸变和枕形畸变,如下: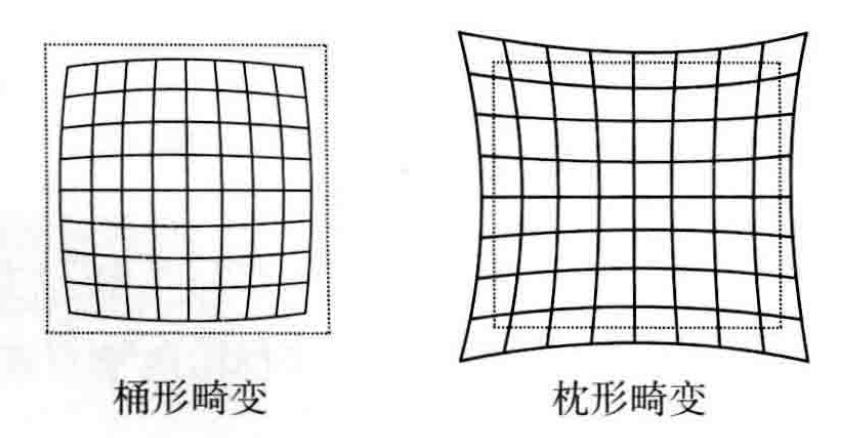
其中桶形畸变大都发生在使用广角镜头或使用变焦镜头的广角端时,枕形畸变则是使用长焦镜头或使用变焦镜头的长焦端时发生。\
用数学形式表示的话,我们先假定归一化平面上有一点$p$,坐标为$[x,y]^T$,对应的极坐标形式为$[r,\theta]^T$,其中$r$表示与坐标系原点的距离,$\theta$表示与水平轴的夹角。径向畸变的话就是$r$发生了变化,畸变后的坐标可表示为:
这里的$k_1,k_2,k_3$即是径向畸变参数。\
这里的多项式不一定非得是这几个,可以多写几项或少些几项,看自己需求吧,不过大都用这几个表示。\
切向畸变
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的,其畸变来源示意图如下: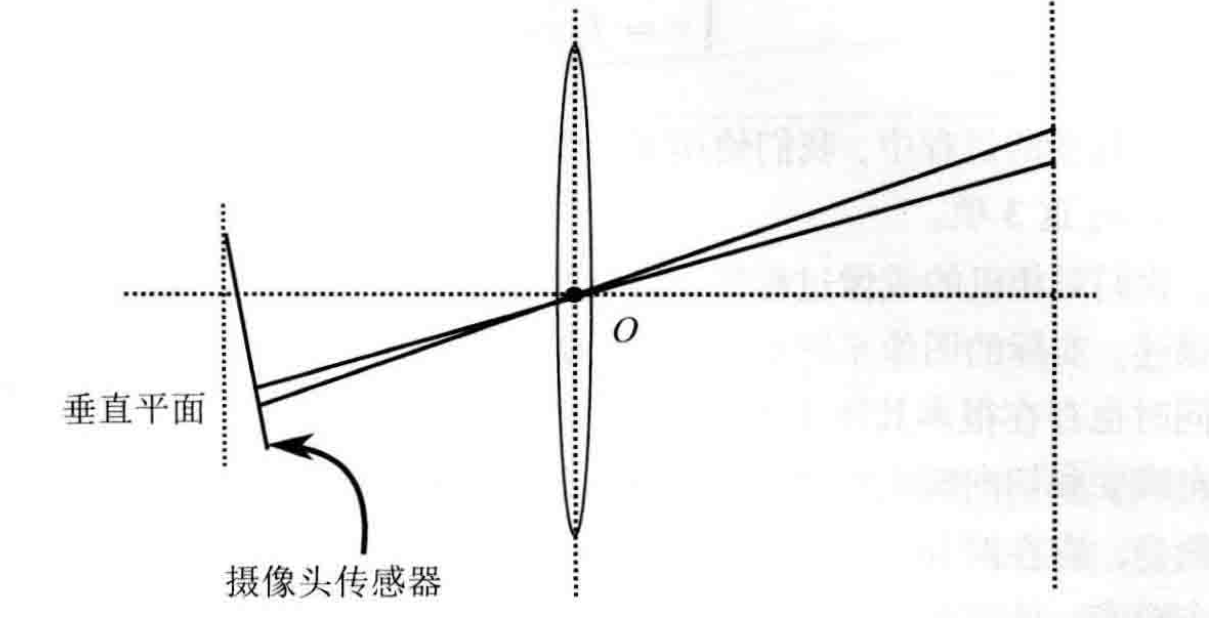
同样可用数学表示如下:
这里的$p_1,p_2$就是切向畸变参数。
求解畸变参数
首先,根据上面两类畸变可知,一个畸变后的坐标应该是这样的:
这里涉及到5个畸变参数,分别为:$k_1,k_2,k_3,p_1,p_2$。\
畸变的话不能直接求解,但可以用优化的思想,目标函数选用最小化重投影误差,也就是将空间坐标点按照估计的投影方程投影到图像上,得到像素估计值,使该值与实际观测值之间的误差最小。\
其中变量初始值设为:畸变参数为0,其余参数用上面无畸变标定的方法的结果。\
注意,这里的优化变量不只是畸变参数,还有其余内参。\
至于其中的优化细节,一大堆公式还没看,留着以后吧。\
其实直接用OpenCV或者Matlab就可以弄出来了,尤其是Matlab,真-傻瓜式操作,不过还是得知道这些内部算法的。这个优化细节,以后有心情的话看完再补充了。
附
关于坐标系的投影变换,可以看这个,有直接的例子。
参考
【1】 视觉SLAM 14讲\
【2】 https://shartoo.github.io/2016/10/25/SVD-decomponent/ \
【3】 https://www.qinxing.xyz/posts/b7ea425d/ \
【4】 https://zhuanlan.zhihu.com/p/24651968 \
【5】 https://zhuanlan.zhihu.com/p/87334006